Richard Feynman说“如果要真正理解一个东西,我们必须要能够把它创造出来。”
GAN 启发自博弈论中的二人零和博弈(two-player game),GAN 模型中的两位博弈方分别由生成式模型(generative model)和判别式模型(discriminative model)充当。生成模型 G 捕捉样本数据的分布,用服从某一分布(均匀分布,高斯分布等)的噪声 z 生成一个类似真实训练数据的样本,追求效果是越像真实样本越好;判别模型 D 是一个二分类器,估计一个样本来自于训练数据(而非生成数据)的概率,如果样本来自于真实的训练数据,D 输出大概率,否则,D 输出小概率。
Intuition
通常,我们会用下面这个例子来说明 GAN 的原理:将警察视为判别器,制造假币的犯罪分子视为生成器。一开始,犯罪分子会首先向警察展示一张假币。警察识别出该假币,并向犯罪分子反馈哪些地方是假的。接着,根据警察的反馈,犯罪分子改进工艺,制作一张更逼真的假币给警方检查。这时警方再反馈,犯罪分子再改进工艺。不断重复这一过程,直到警察识别不出真假,那么模型就训练成功了。
GAN强大之处在于可以自动的学习原始真实样本集的数据分布,GAN的生成模型最后可以通过噪声生成一个完整的真实数据(比如人脸),说明生成模型已经掌握了从随机噪声到人脸数据的分布规律了,有了这个规律,想生成人脸还不容易。然而这个规律我们开始知道吗?显然不知道,如果让你说从随机噪声到人脸应该服从什么分布,你不可能知道。这是一层层映射之后组合起来的非常复杂的分布映射规律。然而GAN的机制可以学习到,也就是说GAN学习到了真实样本集的数据分布。
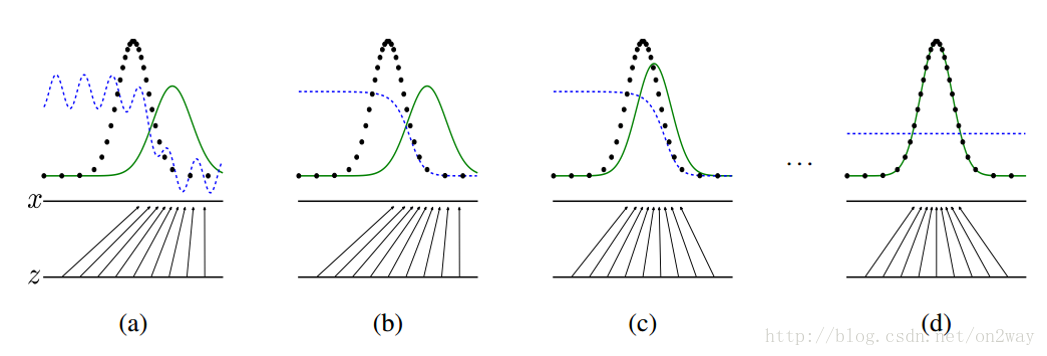
这张图表明的是GAN的生成网络如何一步步从均匀分布学习到正太分布的。原始数据x服从正太分布,这个过程你也没告诉生成网络说你得用正太分布来学习,但是生成网络学习到了。假设你改一下x的分布,不管什么分布,生成网络可能也能学到。
判别模型
假设现在生成网络模型已经有了(当然可能不是最好的生成网络),那么给一堆随机数组,就会得到一堆假的样本集(因为不是最终的生成模型,那么现在生成网络可能就处于劣势,导致生成的样本就不咋地,可能很容易就被判别网络判别出来了说这货是假冒的),但是先不管这个,假设我们现在有了这样的假样本集,真样本集一直都有,现在我们人为的定义真假样本集的标签,因为我们希望真样本集的输出尽可能为1,假样本集为0,很明显这里我们就已经默认真样本集所有的类标签都为1,而假样本集的所有类标签都为0. 有人会说,在真样本集里面的人脸中,可能张三人脸和李四人脸不一样呀,对于这个问题我们需要理解的是,我们现在的任务是什么,我们是想分样本真假,而不是分真样本中那个是张三label、那个是李四label。况且我们也知道,原始真样本的label我们是不知道的。回过头来,我们现在有了真样本集以及它们的label(都是1)、假样本集以及它们的label(都是0),这样单就判别网络来说,此时问题就变成了一个再简单不过的有监督的二分类问题了,直接送到神经网络模型中训练就完事了。假设训练完了,下面我们来看生成网络。
生成模型
对于生成网络,想想我们的目的,是生成尽可能逼真的样本。那么原始的生成网络生成的样本你怎么知道它真不真呢?就是送到判别网络中,所以在训练生成网络的时候,我们需要联合判别网络一起才能达到训练的目的。什么意思?就是如果我们单单只用生成网络,那么想想我们怎么去训练?误差来源在哪里?细想一下没有,但是如果我们把刚才的判别网络串接在生成网络的后面,这样我们就知道真假了,也就有了误差了。所以对于生成网络的训练其实是对生成-判别网络串接的训练。好了那么现在来分析一下样本,原始的噪声数组Z我们有,也就是生成了假样本我们有,此时很关键的一点来了,我们要把这些假样本的标签都设置为1,也就是认为这些假样本在生成网络训练的时候是真样本。那么为什么要这样呢?我们想想,是不是这样才能起到迷惑判别器的目的,也才能使得生成的假样本逐渐逼近为正样本。好了,重新顺一下思路,现在对于生成网络的训练,我们有了样本集(只有假样本集,没有真样本集),有了对应的label(全为1),是不是就可以训练了?有人会问,这样只有一类样本,训练啥呀?谁说一类样本就不能训练了?只要有误差就行。还有人说,你这样一训练,判别网络的网络参数不是也跟着变吗?没错,这很关键,所以在训练这个串接的网络的时候,一个很重要的操作就是不要判别网络的参数发生变化,也就是不让它参数发生更新,只是把误差一直传,传到生成网络那块后更新生成网络的参数。这样就完成了生成网络的训练了。
在完成生成网络训练好,那么我们是不是可以根据目前新的生成网络再对先前的那些噪声Z生成新的假样本了,没错,并且训练后的假样本应该是更真了才对。然后又有了新的真假样本集(其实是新的假样本集),这样又可以重复上述过程了。我们把这个过程称作为单独交替训练。我们可以实现定义一个迭代次数,交替迭代到一定次数后停止即可。这个时候我们再去看一看噪声Z生成的假样本会发现,原来它已经很真了。
损失函数
对于判别器$D$,其优化函数:

对于生成器$G$,其优化函数:

GAN的特殊理解
GAN的目标是学习一个从指定分布数据到目标分布数据的映射,一旦学习好了这个映射,我们则需要比较这两个分布的相近程度,注意不是比较样本之间的差距。通常我们会用考KL距离来描述这两个分布的差异,但是GAN并没有指定任何距离,而是学习出一个距离度量。
假设我们的GAN的网络参数是$\theta$, 目标分布是$z_i$,拟合出来的分布是$y_i$,那么GAN有一个独立的距离度量网络$L$,输入$z_i$和$y_i$,自动计算分布的差异,即:
考虑到$\{z_i\}_{i=1}^{M}$是已知的,我们可以将之视作非变量,当成模型的一部分,则上式可以简写为:
但是,我们比较的是分布间的距离,即分布本身与各个$y_i$出现的顺序是没有关系的,因此,尽管$L$是各个$y_i$和函数,但它必须全对称,
也就是说,我们先找⼀个有序的函数$D$,然后对所有可能的序求平均,那么就得到⽆序的函数了。当然,这样的计算量是$O(M!)$,显然也不靠谱,那么我们就选择最简单的⼀种:
这便是⽆序的最简单实现,可以简单的理解为:分布之间的距离,等于单个样本的距离的平均。
因为$D(Y,\theta)$的均值, 也就是$L$, 是度量两个分布的差异程度, 这就意味着,要能够将两个分布区分开来,即$L$越⼤越好;但是我们最终的⽬的,是希望通过均匀分布⽽⽣成我们指定的分布,所以$G(X,\theta)$则希望两个分布越来越接近,即$L$越⼩越好。
训练$D(Y,\Theta)$的时候,我们随机初始化$G(X,\theta)$,固定它,然后生成一批$Y$。我们再从目标样本中采样一批$Z$,则
然⽽有两个⽬标并不容易平衡,所以⼲脆都取同样的样本数$B$(⼀个batch),然后⼀起训练就好:
而$G(X,\theta)$希望⽣成的样本越接近真实样本越好,因此这时候把$D$的参数$\Theta$固定,只训练 $\theta$让$L$越来越⼩:
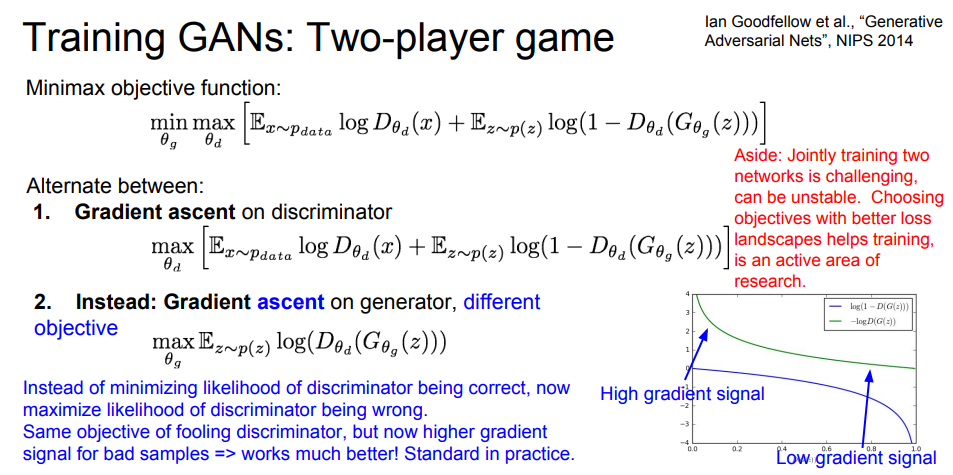
实际上,传统的GAN公式如下
局限
在手写体数字生成过程中,我们无法得知什么样的噪声z可以用来生成数字1,什么样的噪声z可以用来生成数字3,我们对这些一无所知,这从一点程度上限制了我们对GAN的使用。
GAN实现
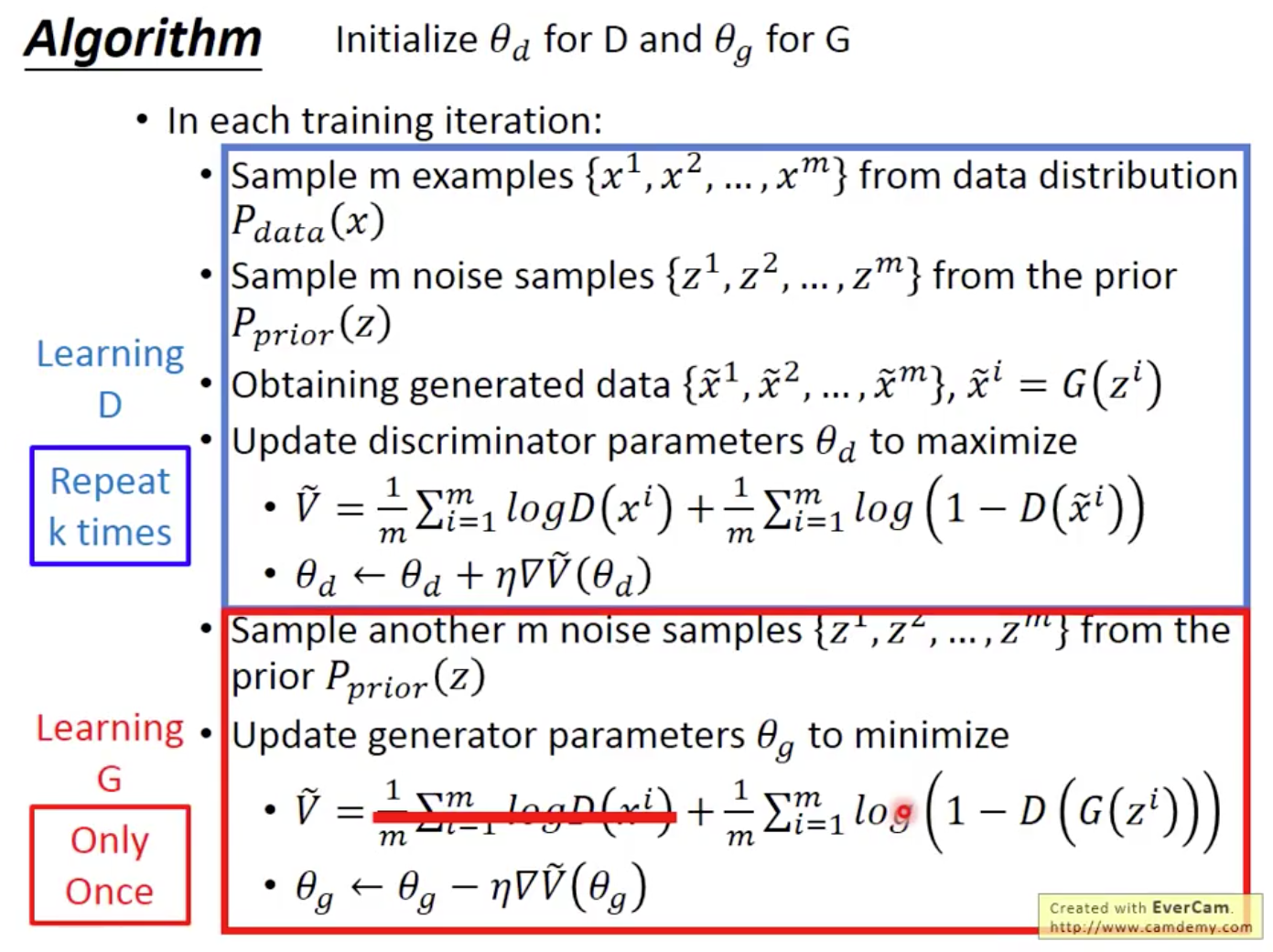
GAN训练伪代码
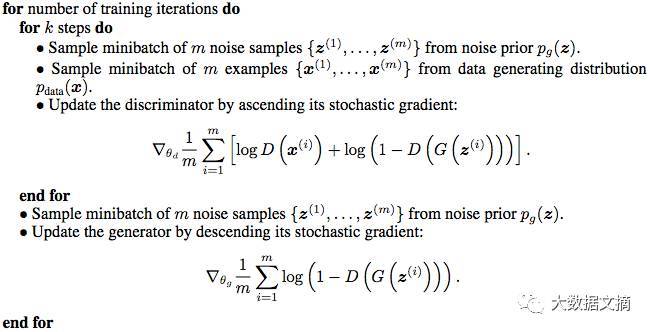
这里红框圈出的部分是我们要额外注意的。第一步我们训练D,D是希望V(G, D)越大越好,所以是加上梯度(ascending)。第二步训练G时,V(G, D)越小越好,所以是减去梯度(descending)。整个训练过程交替进行。
keras实现手写体
|
|